梶研 [端末姿勢推定]
2023年9月12日
端末姿勢推定
出席率
- 3年セミナー:??%
スケジュール
短期的な予定
- 端末姿勢推定
- データを収集
- グラフを作成
- 静止状態の判別
- 端末の姿勢を推定
- 加速度を世界座標に変換
- 角速度を世界座標に変換
- カルマンフィルターを用いた推定
長期的な予定
- 9月23日 技育展 決勝
- 9月中旬まで 端末姿勢推定(加速度, 角速度)
- 10月まで? 端末姿勢推定(カルマンフィルター)
- 10月中 Kotlin(とRust)の勉強 「いつでもセンシングアプリ」
進捗
やりたいこと
端末の姿勢推定
加速度を端末座標から世界座標にする
考え方
- 加速度に変化がない(動いていない)時は、重力加速度の方向から端末状態を出す
- 変化がある時は、ジャイロセンサーから端末状態を出す
- 最終的には
カルマンフィルターを使う
前回
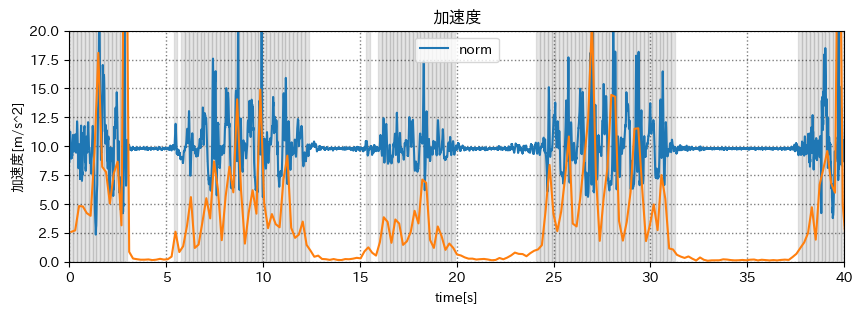
灰色は動いていると判断した区間
橙は区間内の最大値と最小値の差
200ms(80フレーム) ごとに区切り、区間内の最大値と最小値の差が 1m/s^2 以下の時は、
動いていないと判断する
静止状態の判別を変更
差ではなく、分散を用いる
200ms(80フレーム) ごとに区切り、区間内の分散が 0.15m/s^2 以下の時は、静止状態とする
加速度のグラフ(ノルム)
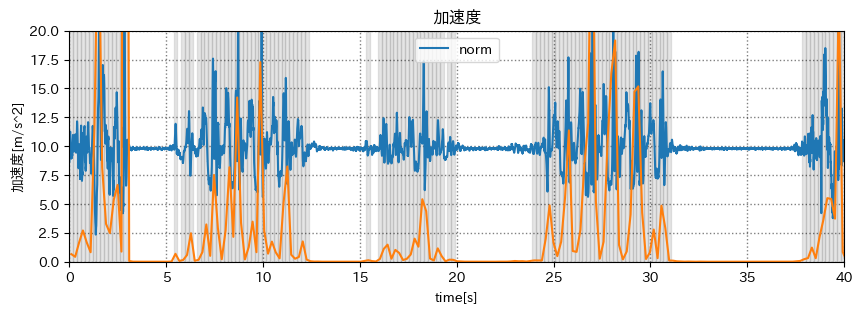
- 静止状態との差が大きくなっていて良い
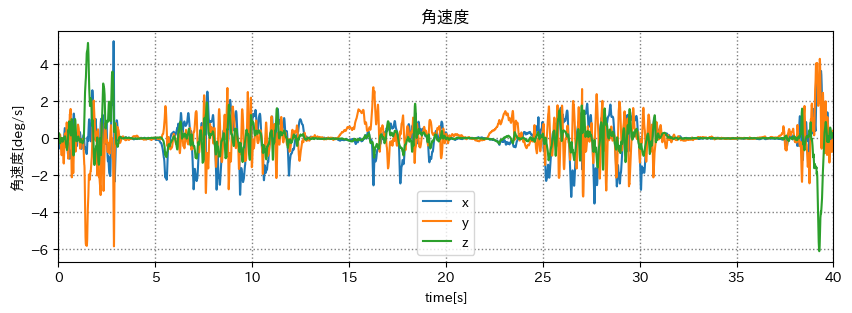
角速度から端末の傾きを出す
角速度を積分して角度を出す
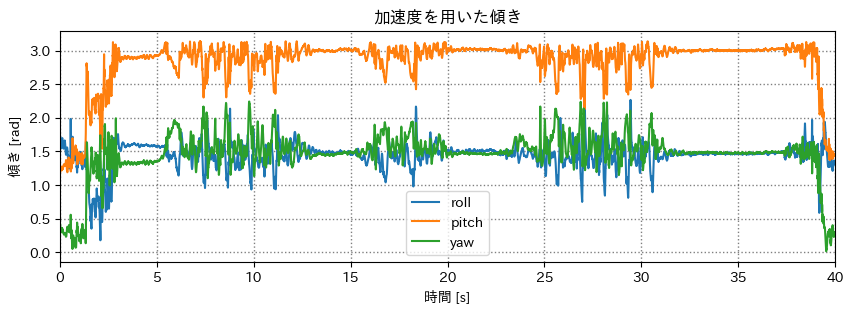
加速度から端末の姿勢を出す
加速度の絶対値で各軸の加速度を割って、arccosをとる
1gravity = math.sqrt(x ** 2 + y ** 2 + z ** 2) 2angle_x = math.acos(x / gravity) 3angle_y = math.acos(y / gravity) 4angle_z = math.acos(z / gravity)
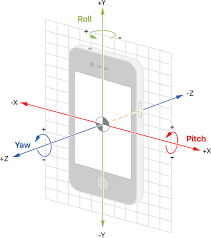
回転軸の参考
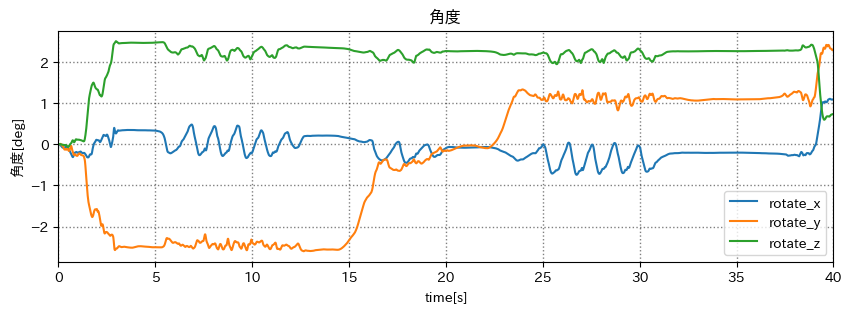
加速度と傾きを使い分ける
分散が 0.15m/s^2 以下の時は、加速度からの傾きを使う
0.15m/s^2 以上の時は、角速度を足して端末の回転を反映させる
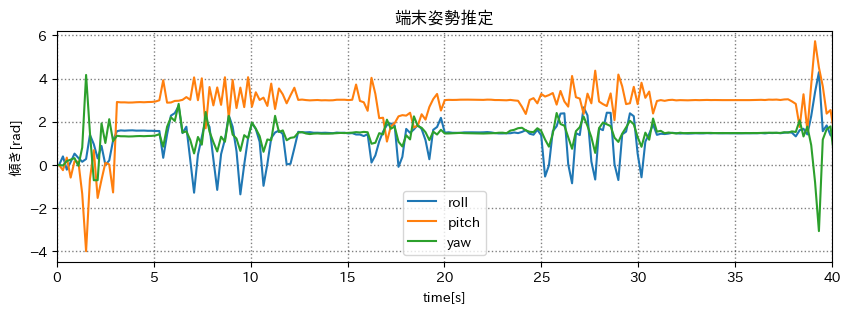
- 傾きが大きすぎる
角速度を反映時にサンプリング周波数を掛けていない- 単位が
radとdegで違った
- より大きな動作(傾き)でやるべき?
- スマホ持って各軸90度程度回転など
修正後
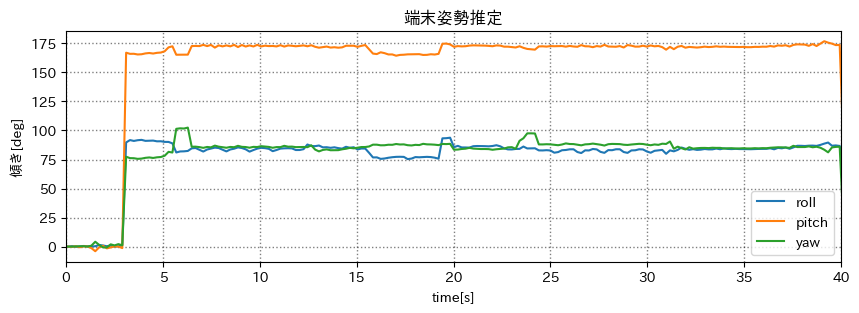
結構理想通りにはなったが正解が分からない
- 加速度を世界座標系に変換する
- 正解データとの比較ができるデータを取る
加速度を世界座標系に変換
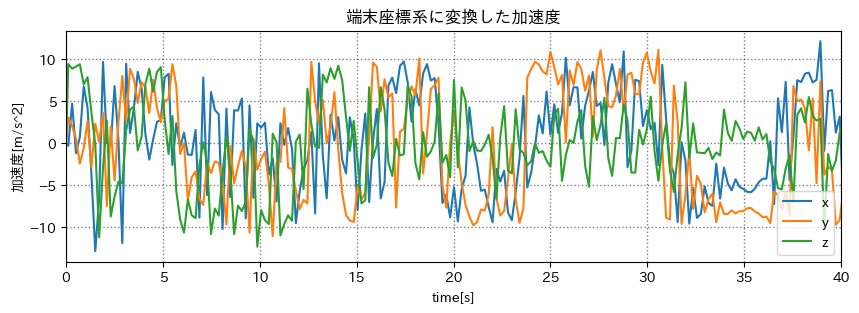
明らかにおかしい
- ベクトル(加速度)を回転させる関数は以前のものを使用したため合ってるはず
- 元の加速度と姿勢推定後のデータのサンプリング周波数の違い?
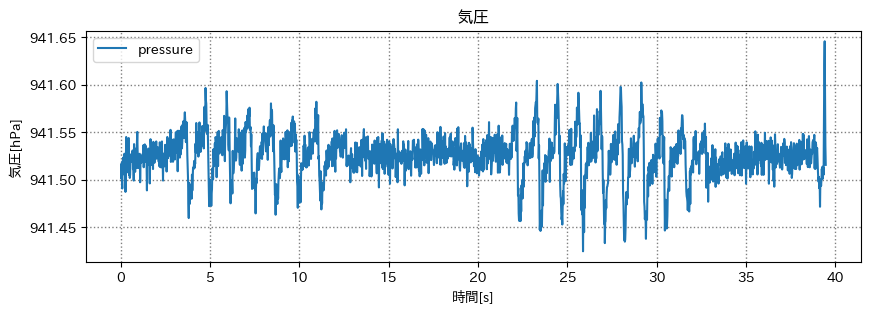
余談
キャンプした
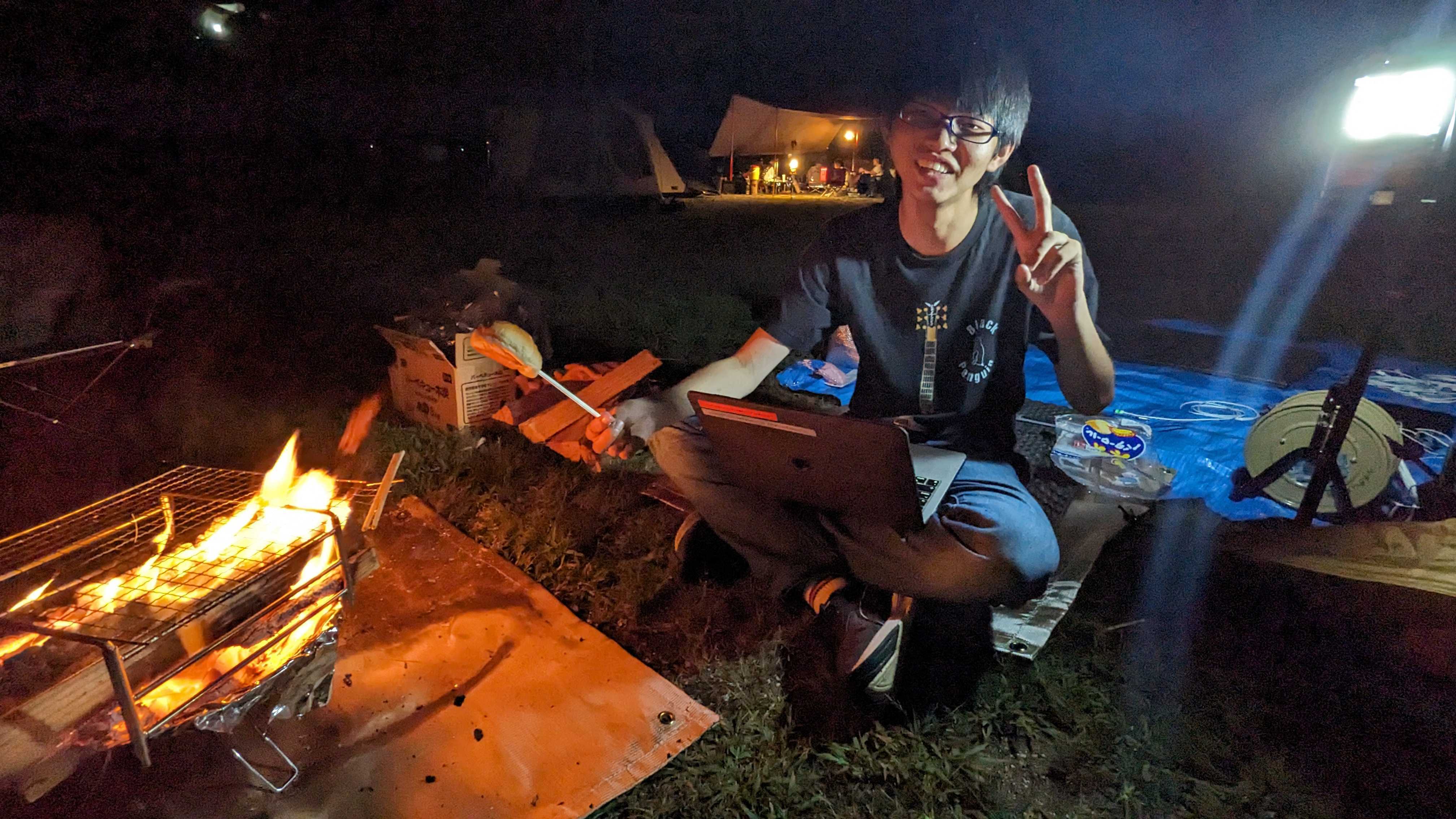
センシングした
技育CAMP vol9(工科展)
学校(食堂等)の混雑を知れるアプリ
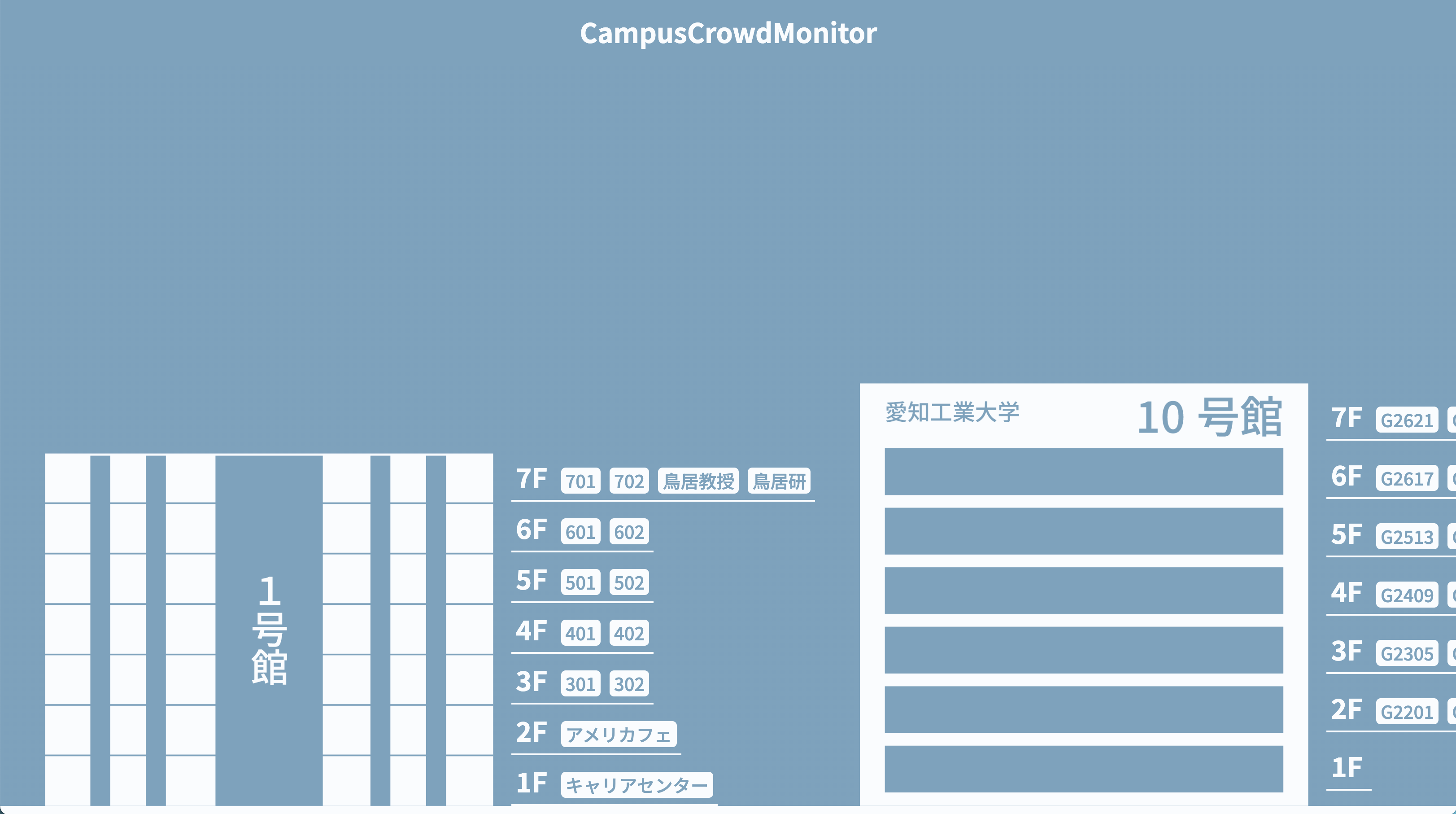
賞はもらえなかったが、多くの反響をいただけた

