梶研 [端末座標系を世界座標系に]
2023年7月4日
端末座標系を世界座標系に
出席率
- 3年セミナー:??%
スケジュール
短期的な予定
- 端末座標系を世界座標系に
- データをとる
- 重力に対する各軸の傾きを出す
- 2次元ベクトルを回転させる
- 3次元ベクトルを回転させる
- 端末座標系を世界座標系に変換する
長期的な予定
- 8/5 技育キャンプ ハッカソン
- 8/12 技育展
- 8/26 OpenHackU
- 9/2 技育キャンプ アドバンス
- 10/7,8 工科展
進捗報告
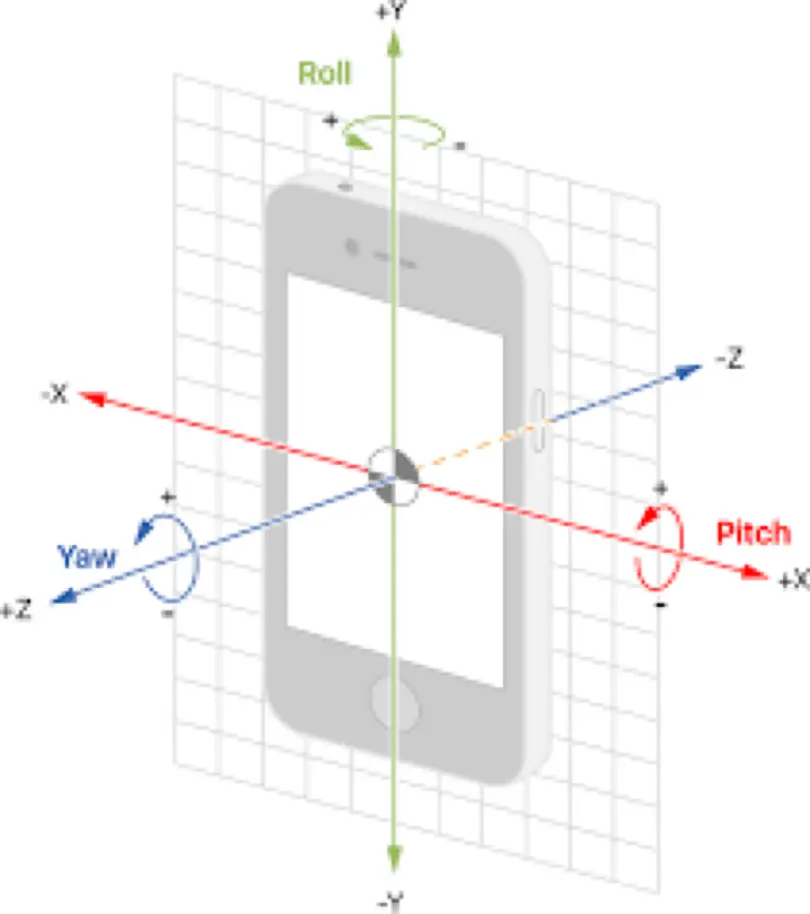
世界座標の基準
スマホの画面(z軸正)が垂直上向の状態を世界座標の基準とする
端末の傾きの出し方の確認
端末の傾きの計算方法
1roll = math.acos(x / gravity) 2pitch = math.acos(y / gravity) 3yaw = math.acos(z / gravity)
z軸正が上向きの場合
- x軸: 0.0(m/s^2)
- y軸: 0.0(m/s^2)
- z軸: 9.8(m/s^2)
1x軸: 90.0度 (0度) 2y軸: 90.0度 (0度) 3z軸: 0.0度 (0度)
() 内は理想
x軸正が上向きの場合
- x軸: 9.8(m/s^2)
- y軸: 0.0(m/s^2)
- z軸: 0.0(m/s^2)
1x軸: 0.0度 (0度) 2y軸: 90.0度 (0度) 3z軸: 90.0度 (0度)
y軸正が上向きの場合
- x軸: 0.0(m/s^2)
- y軸: 9.8(m/s^2)
- z軸: 0.0(m/s^2)
1x軸: 90.0度 (0度) 2y軸: 0.0度 (0度) 3z軸: 90.0度 (0度)
計算方法の変更
この計算方法では重力と各軸の角度を出している
1x軸(roll) : 90.0度 2y軸(pitch): 90.0度 3z軸(yaw) : 0.0度
この状態を基準とすると
x軸正が上向きの場合
1x軸(roll) : -90.0度 2y軸(pitch): 0.0度 3z軸(yaw) : -90.0度
y軸正が上向きの場合
1x軸(roll) : 90.0度 2y軸(pitch): 0.0度 3z軸(yaw) : 90.0度
回転後のグラフ
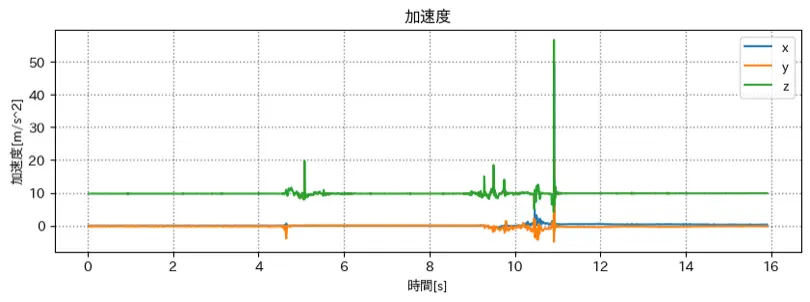
比較
元データ
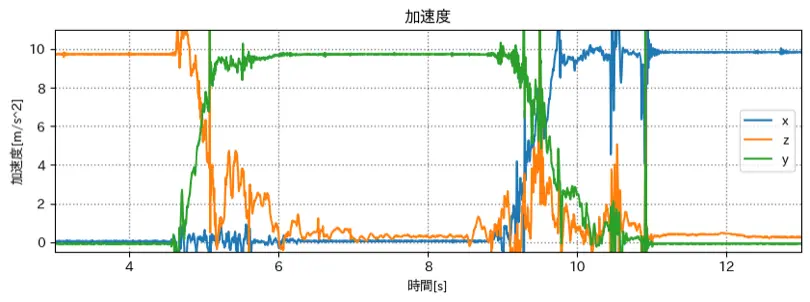
回転後
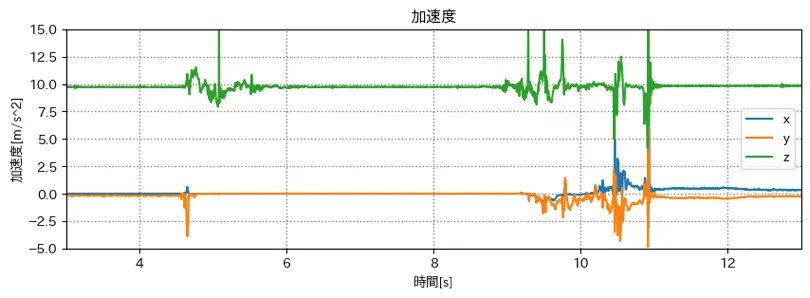
動かしているときは誤差が生まれているが、
静止状態では理想的な値になっている
加速度では下方向しかとれないため、
垂直方向(今回はz軸)を軸とした回転量はわからないのでは?
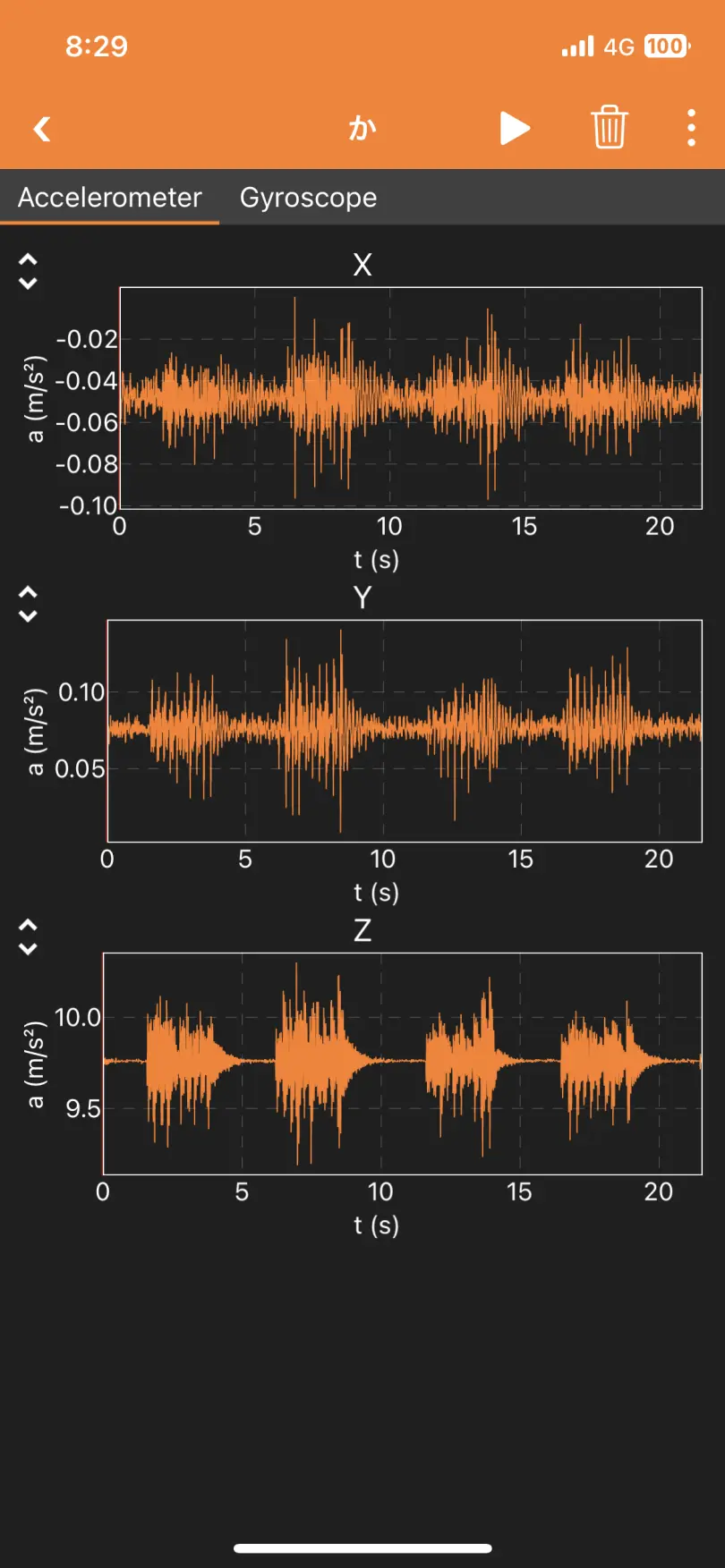
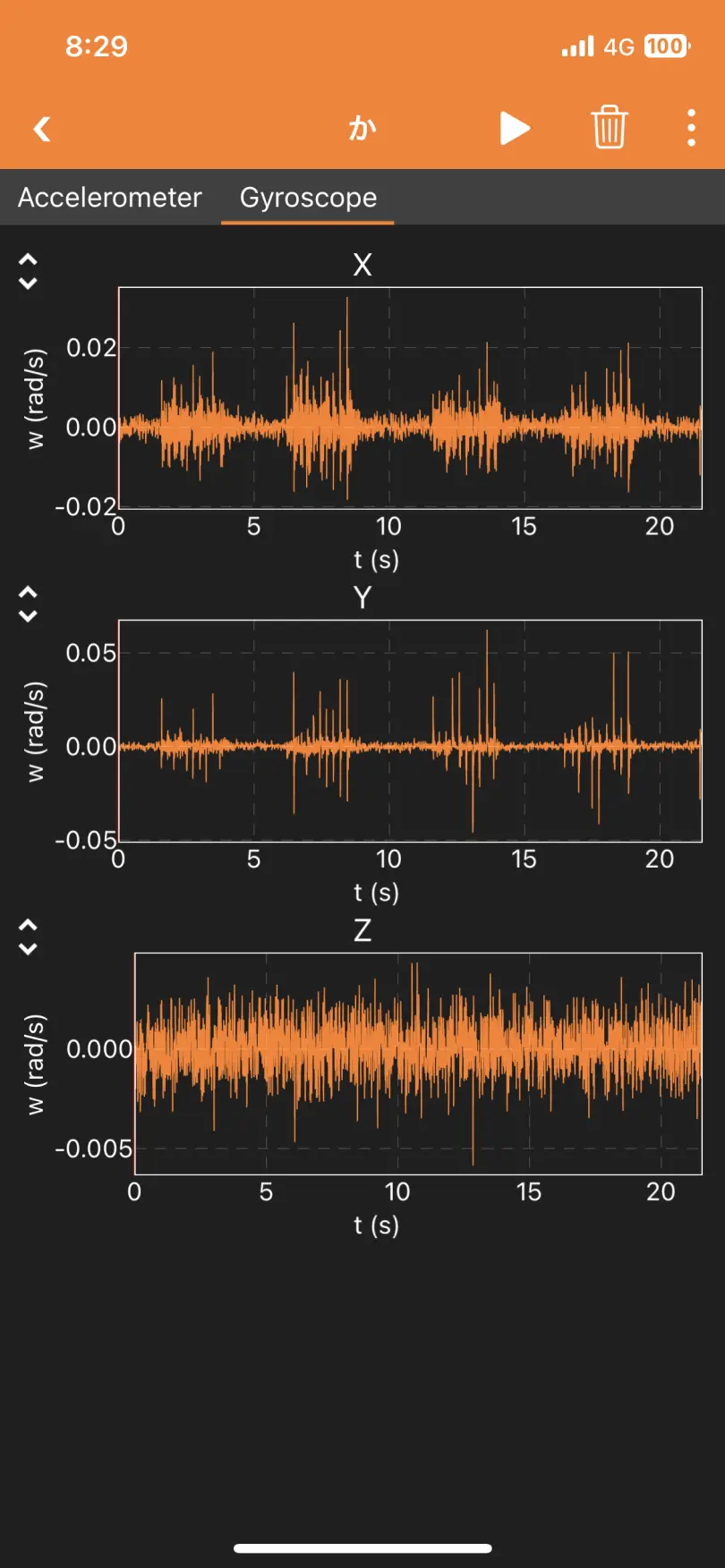
余談
スマホを机に置いた状態で、周りをコンコン叩いた様子
右→下→左→上
なにか遊べそう
(オンラインとんとん相撲的な)