梶研 [端末座標系を世界座標系に]
2023年6月27日
端末座標系を世界座標系に
出席率
- 3年セミナー:??%
スケジュール
短期的な予定
- 端末座標系を世界座標系に
- データをとる
- 重力に対する各軸の傾きを出す
- 2次元ベクトルを回転させる
- 3次元ベクトルを回転させる
- 端末座標系を世界座標系に変換する
長期的な予定
- 8/5 技育キャンプ ハッカソン
- 8/12 技育展
- 8/26 OpenHackU
- 9/2 技育キャンプ アドバンス
- 10/7,8 工科展
進捗報告
3次元ベクトルを回転させる
元の加速度
端末の傾き
元の加速度 を 端末の傾き だけ回転させる
回転後のベクトル
理想は y は常に9.8, x,z は常に0 になるはず
=> roll, pitch, yaw の回転のさせ方の問題?
roll だけ掛けたグラフ
y(橙) が理想に近づいた
pitch だけ掛けたグラフ
yaw だけ掛けたグラフ
上下が合えばいいから roll, pitch, yaw 全て使う必要はないかも?
考え直す
計算した roll, pitch, yaw が入れ替わってしまっている可能性がある
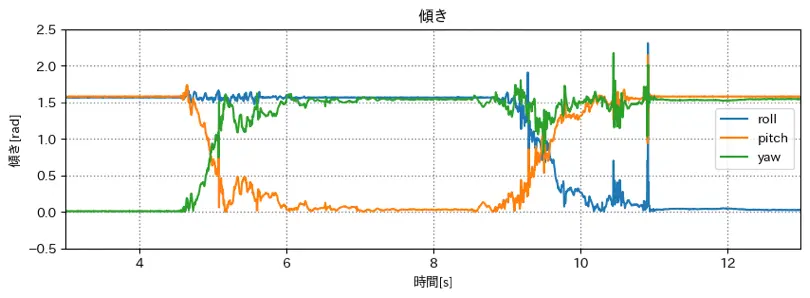
端末の座標系
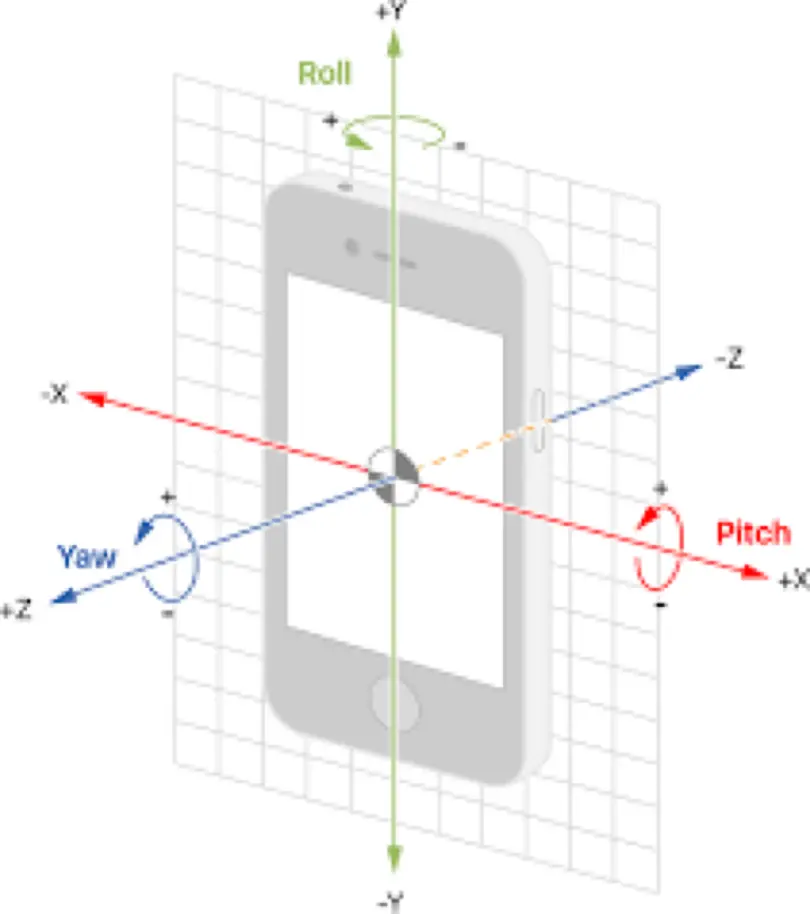
端末の傾き
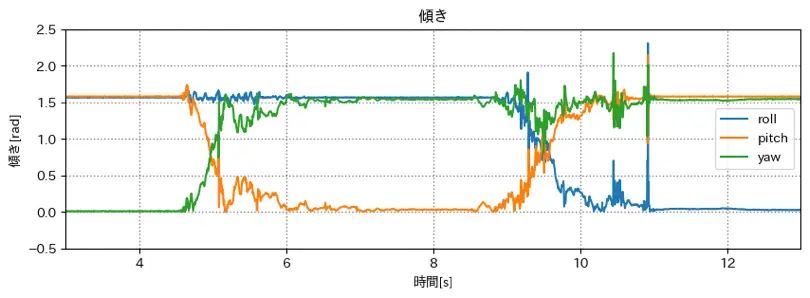
0s - 4s
端末の状態は z軸正が上向き
=> pitch 以外が回転している
傾きが 0deg である 緑 は pitch か yaw
(yaw として扱っていた)
6s - 8s
端末の状態は y軸正が上向き
=> 傾きが 0deg である 橙 が roll か pitch
(pitch として扱っていた)
11s - 13s
端末の状態は x軸正が上向き
=> 傾きが 0deg である 青 が roll か yaw
(roll として扱っていた)
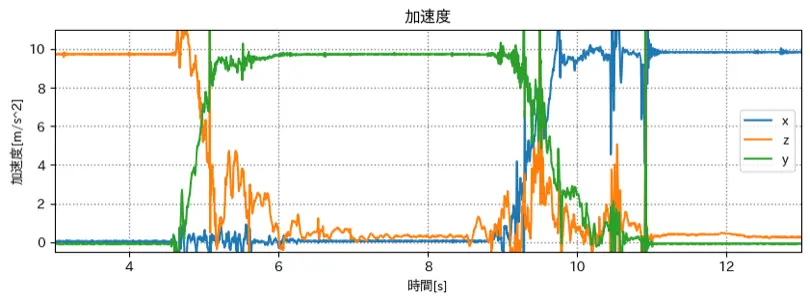
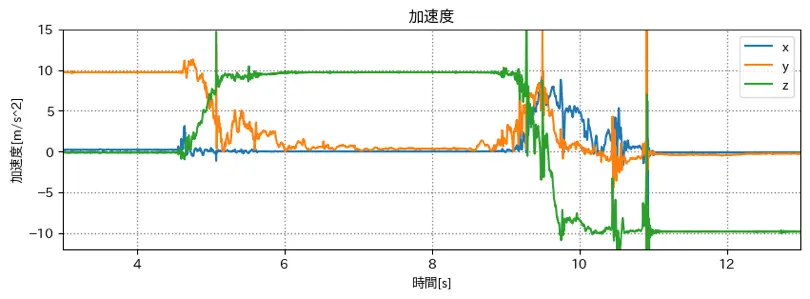
変更後のグラフ 1
- roll: 橙
- yaw: 青
- pitch: 緑
とした場合のグラフ
違う.
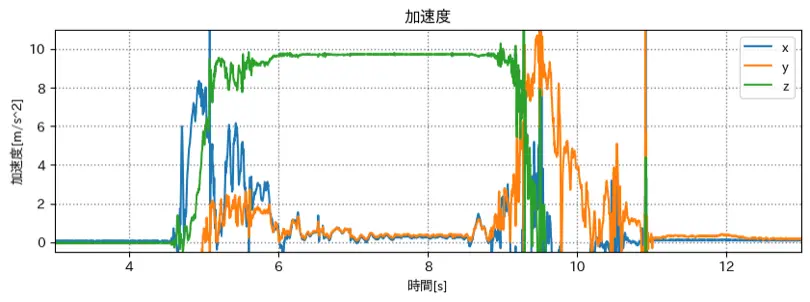
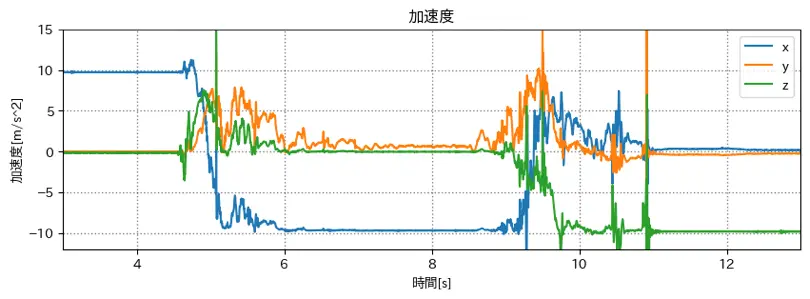
変更後のグラフ 2
いろいろ試してみた
- roll: 青
- yaw: 橙
- pitch: 緑
とした場合のグラフ
緑(z軸) が 常にほぼ 0(m/s^2) になった.
y軸が 9.8(m/s^2) になって欲しい
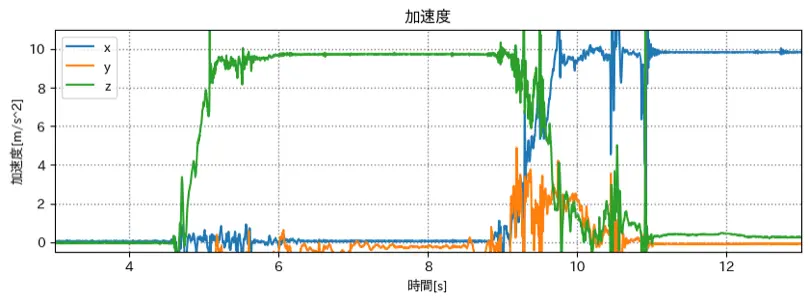
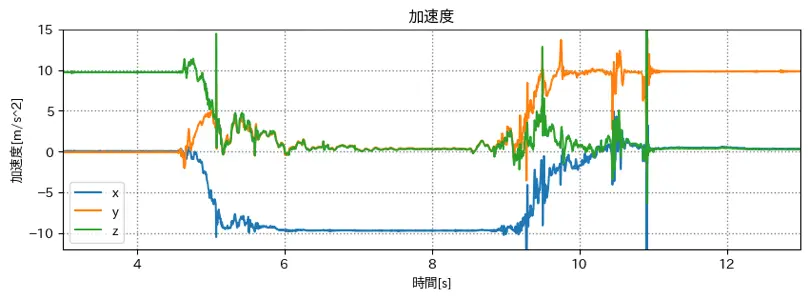
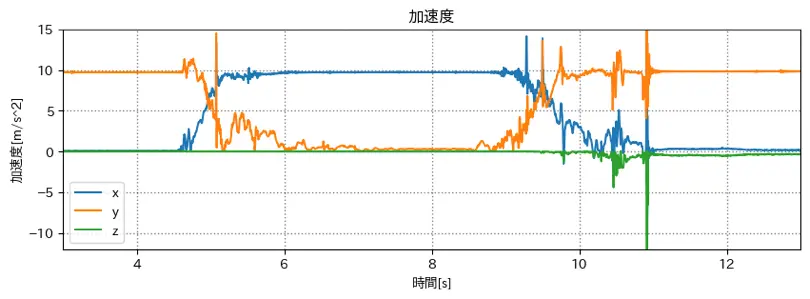
変更後のグラフ 3
いろいろ試してみた
- roll: 青
- yaw: 緑
- pitch: 橙
とした場合のグラフ
青(x軸) が 常にほぼ 0(m/s^2) になった.
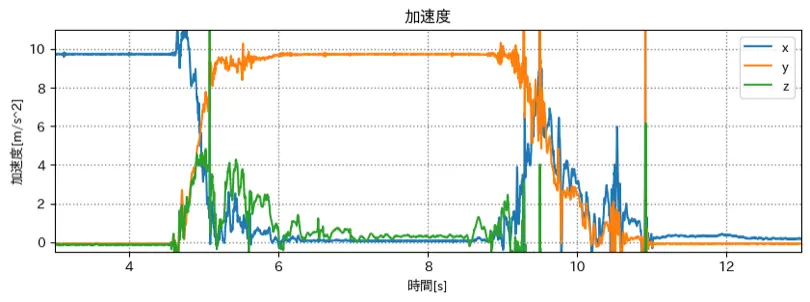
変更後のグラフ 4
いろいろ試してみた
- roll: 青
- yaw: 橙
- pitch: 緑
とした場合のグラフ
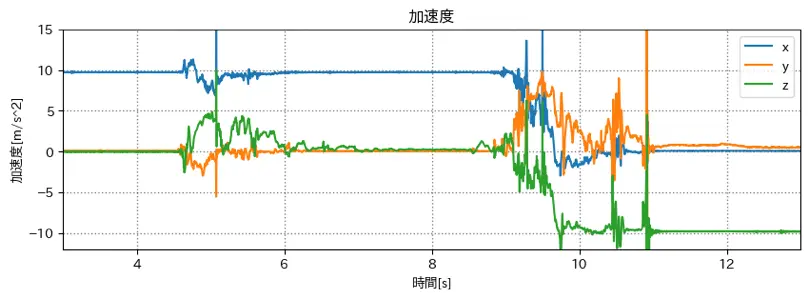
9秒までは結構理想的な形になっている.
ただし, 9.8(m/s^2) は x軸になっている.
(軸自体も間違っている可能性もある)
全パターン試したけど理想的な形のものにはならなかった.
x, z が 0 にはなるが y が 9.8 にならない.
=> 回転のさせ方が間違っている可能性がある
回転させる順番
回転させる順番によって結果変わってしまう.
3次元ベクトルを回転させる方法として正しくなさそう
回転行列
x軸周り
$$
R_x =
\begin{bmatrix}
1 & 0 & 0 \\
0 & \cos \theta & -\sin \theta \\
0 & \sin \theta & \cos \theta \\
\end{bmatrix}
$$
y軸周り
$$
R_y =
\begin{bmatrix}
\cos \theta & 0 & \sin \theta \\
0 & 1 & 0 \\
-\sin \theta & 0 & \cos \theta \\
\end{bmatrix}
$$
z軸周り
$$
R_z =
\begin{bmatrix}
\cos \theta & -\sin \theta & 0 \\
\sin \theta & \cos \theta & 0 \\
0 & 0 & 1 \
\end{bmatrix}
$$
としたとき,
回転行列をかける順番によって結果が変わる
$$
\begin{bmatrix}
x \\
y \\
z \\
\end{bmatrix}
{\times}R_x
{\times}R_y
{\times}R_z
{\neq}
\begin{bmatrix}
x \\
y \\
z \\
\end{bmatrix}
{\times}R_y
{\times}R_x
{\times}R_z
$$
例
[2,3,5] のベクトルを全て 30deg回転させた結果
$$
\begin{bmatrix}
2.82 \\
4.25 \\
3.45 \\
\end{bmatrix} =
\begin{bmatrix}
2 \\
3 \\
5 \\
\end{bmatrix}
{\times}R_x
{\times}R_y
{\times}R_z
$$
$$
\begin{bmatrix}
0.83\\
5.24\\
3.12\\
\end{bmatrix} =
\begin{bmatrix}
2 \\
3 \\
5 \\
\end{bmatrix}
{\times}R_y
{\times}R_z
{\times}R_x
$$
余談
夏休み忙しそうだし、せっかくだからやめようと思った.
が, 店長がいい人すぎてお願いを断れなかった.
8-10月まで休みを貰うことに