梶研 [端末座標を世界座標に]
2023年6月13日
端末座標を世界座標に
出席率
- 3年セミナー:??%
スケジュール
短期的な予定
- 端末座標系を世界座標系に
- データをとる
- 重力に対する各軸の傾きを出す
- 2次元ベクトルを回転させる
- 3次元ベクトルを回転させる
- 技育キャンプ ハッカソン
- テーマ決め
- 開発練習
- 7/9 キックオフ
- 7/16 発表
長期的な予定
未定
進捗報告
方法
- 各軸の加速度データから3次元ベクトルにする
- 回転行列を掛けて回転させる
- 3次元ベクトルから各軸の加速度にする
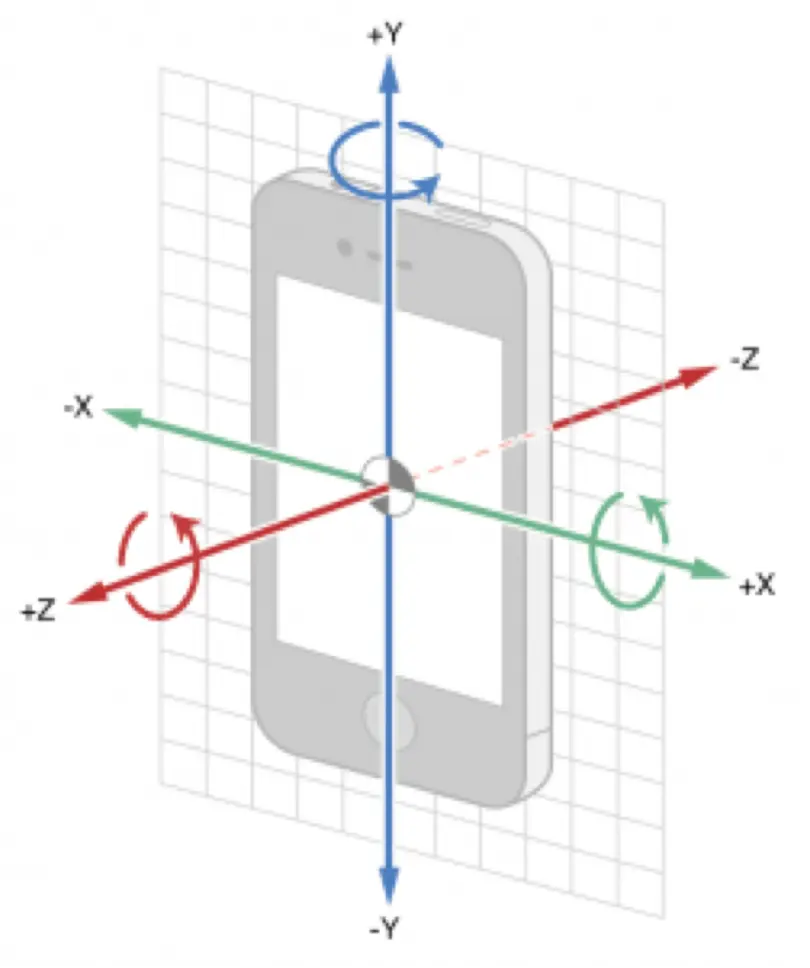
データをとる
- pixel5 (android)
- phyphox
- 加速度センサー
- 角速度センサー
- z軸正が上(約4秒)
- y軸正が上(約4秒)
- x軸正が上(約4秒)
グラフ
加速度
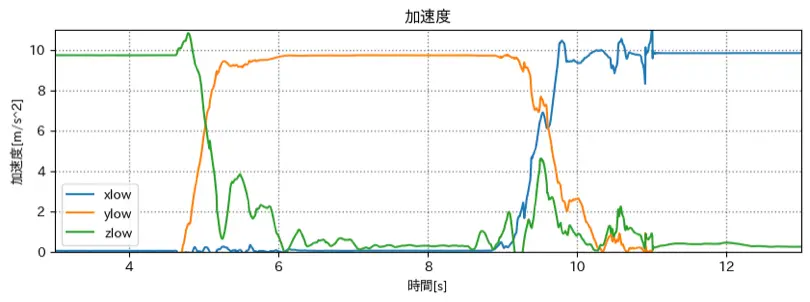
移動平均フィルター(前後40サンプル)をかけている
角速度
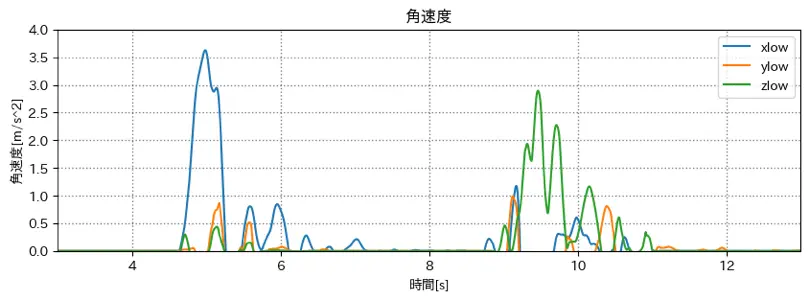
移動平均フィルター(前後40サンプル)をかけている
角度
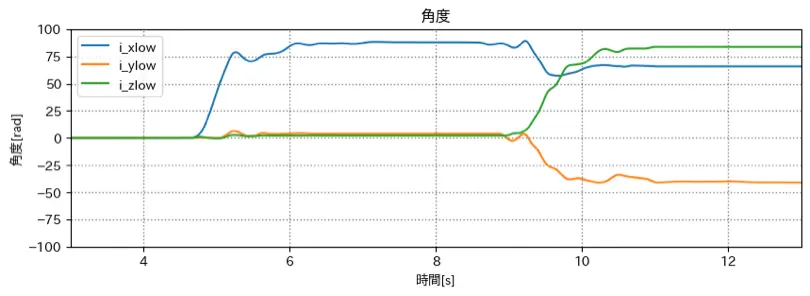
移動平均フィルターをかけたものを積分したもの
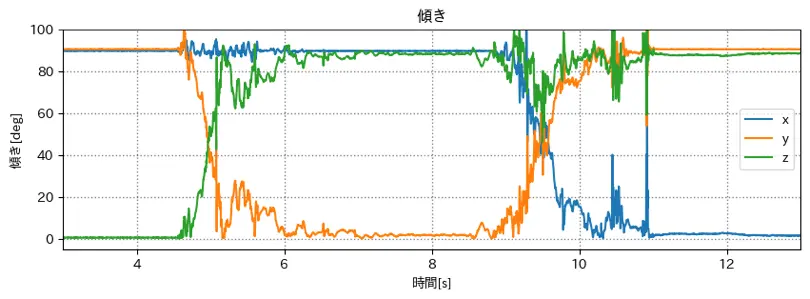
重力に対する各軸の傾きを出す
1gravity = math.sqrt(x ** 2 + y ** 2 + z ** 2) 2 3tilt_angle_x = math.degrees(math.acos(x / gravity)) 4tilt_angle_y = math.degrees(math.acos(y / gravity)) 5tilt_angle_z = math.degrees(math.acos(z / gravity))
重力に対するそれぞれの軸の傾き
ベクトルを回転させる方法
- 回転行列
- 外積の性質を利用
- クォータニオン
回転行列
回転行列はベクトルに対し始点を基準に回転させる
=> 始点は端末の中心とし、端末座標系を回転させれば世界座標系になるのでは
2次元ベクトルを回転させる
(いきなり3次元は無理があった)
計算方法(2次元)
θrad 回転する場合
$$
Vec^{\prime} =
\begin{bmatrix}
\cos \theta & -\sin \theta \\
\sin \theta & \cos \theta \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
\end{bmatrix}
$$
Python
回転行列 R
1cos = np.cos(θ) 2sin = np.sin(θ) 3 4R = np.array( 5 [[cos, -sin], [sin, cos]] 6)
元のベクトル
1vec = [2, 0]
回転後のベクトル
1vec_dash = np.dot(R, vec)
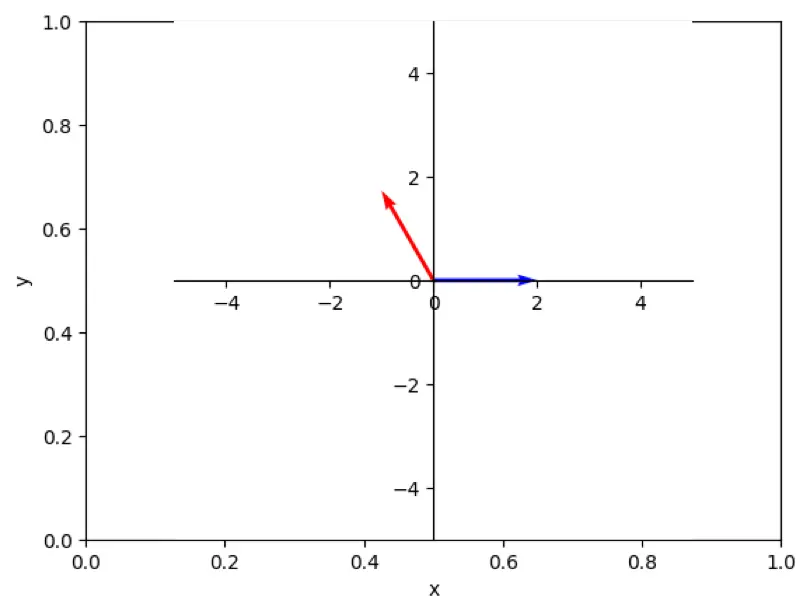
グラフ
青を 120deg 回転させた
3次元ベクトルを回転させる
計算方法(3次元)
θrad 回転する場合
x軸周り
$$
Vec_x^{\prime} =
\begin{bmatrix}
1 & 0 & 0 \\
0 & \cos \theta & -\sin \theta \\
0 & \sin \theta & \cos \theta \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
\end{bmatrix}
$$
y軸周り
$$
Vec_y^{\prime} =
\begin{bmatrix}
\cos \theta & 0 & \sin \theta \\
0 & 1 & 0 \\
-\sin \theta & 0 & \cos \theta \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
\end{bmatrix}
$$
z軸周り
$$
Vec_z^{\prime} =
\begin{bmatrix}
\cos \theta & -\sin \theta & 0 \\
\sin \theta & \cos \theta & 0 \\
0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
\end{bmatrix}
$$
参考
余談
名刺作った!!
